53. Uncertainty Traps#
53.1. Overview#
In this lecture we study a simplified version of an uncertainty traps model of Fajgelbaum, Schaal and Taschereau-Dumouchel [FSTD15].
The model features self-reinforcing uncertainty that has big impacts on economic activity.
In the model,
Fundamentals vary stochastically and are not fully observable.
At any moment there are both active and inactive entrepreneurs; only active entrepreneurs produce.
Agents – active and inactive entrepreuneurs – have beliefs about the fundamentals expressed as probability distributions.
Greater uncertainty means greater dispersions of these distributions.
Entrepreneurs are risk averse and hence less inclined to be active when uncertainty is high.
The output of active entrepreneurs is observable, supplying a noisy signal that helps everyone inside the model infer fundamentals.
Entrepreneurs update their beliefs about fundamentals using Bayes’ Law, implemented via Kalman filtering.
Uncertainty traps emerge because:
High uncertainty discourages entrepreneurs from becoming active.
A low level of participation – i.e., a smaller number of active entrepreneurs – diminishes the flow of information about fundamentals.
Less information translates to higher uncertainty, further discouraging entrepreneurs from choosing to be active, and so on.
Uncertainty traps stem from a positive externality: high aggregate economic activity levels generates valuable information.
53.2. The Model#
The original model described in [FSTD15] has many interesting moving parts.
Here we examine a simplified version that nonetheless captures many of the key ideas.
53.2.1. Fundamentals#
The evolution of the fundamental process
where
The random variable
53.2.2. Output#
There is a total
Output of the
Here the time subscript has been dropped to simplify notation.
The inverse of the shock variance,
The higher is the precision, the more informative
Output shocks are independent across time and firms.
53.2.3. Information and Beliefs#
All entrepreneurs start with identical beliefs about
Signals are publicly observable and hence all agents have identical beliefs always.
Dropping time subscripts, beliefs for current
Here
These parameters are updated by Kalman filtering.
Let
With this notation and primes for next period values, we can write the updating of the mean and precision via
These are standard Kalman filtering results applied to the current setting.
Exercise 1 provides more details on how (53.2) and (53.3) are derived, and then asks you to fill in remaining steps.
The next figure plots the law of motion for the precision in (53.3)
as a 45 degree diagram, with one curve for each
The other parameter values are
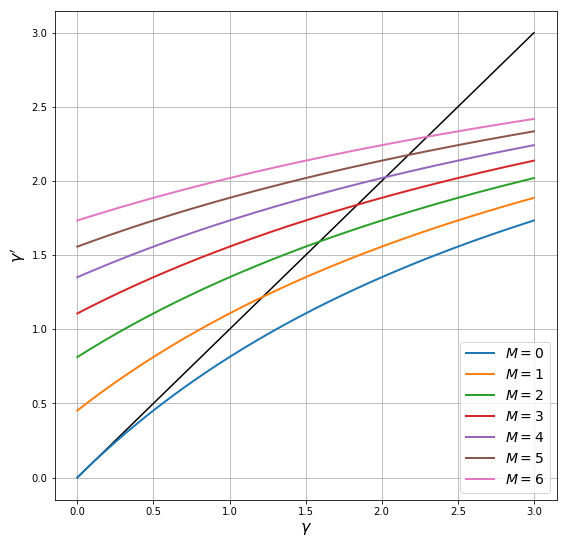
Points where the curves hit the 45 degree lines are long run steady
states for precision for different values of
Thus, if one of these values for
high values of
low values of
In practice, as we’ll see, the number of active firms fluctuates stochastically.
53.2.4. Participation#
Omitting time subscripts once more, entrepreneurs enter the market in the current period if
Here
the mathematical expectation of
The statement that
The utility function has the constant absolute risk aversion form
where
Combining (53.4) and (53.5), entrepreneur
Using standard formulas for expectations of lognormal random variables, this is equivalent to the condition
53.3. Implementation#
We want to simulate this economy.
We’ll want a named tuple generator of the kind that we’ve seen before.
And we need methods to update
The updating methods follow the laws of motion for
The method to evaluate the number of active firms generates
using LinearAlgebra, Statistics
using DataFrames, LaTeXStrings, Plots
function # standard dev. of shock
UncertaintyTrapEcon(; a = 1.5, # risk aversion
gamma_x = 0.5, # production shock precision
rho = 0.99, # correlation coefficient for theta
sigma_theta = 0.5, # standard dev. of theta shock
num_firms = 100, # number of firms
sigma_F = 1.5, # standard dev. of fixed costs
c = -420.0, # external opportunity cost
mu_init = 0.0, # initial value for mu
gamma_init = 4.0, # initial value for gamma
theta_init = 0.0, # initial value for theta
sigma_x = sqrt(a / gamma_x)) # standard dev. of shock
(; a, gamma_x, rho, sigma_theta, num_firms, sigma_F, c, mu_init, gamma_init,
theta_init, sigma_x)
end
UncertaintyTrapEcon (generic function with 1 method)
In the results below we use this code to simulate time series for the major variables.
53.4. Results#
Let’s look first at the dynamics of
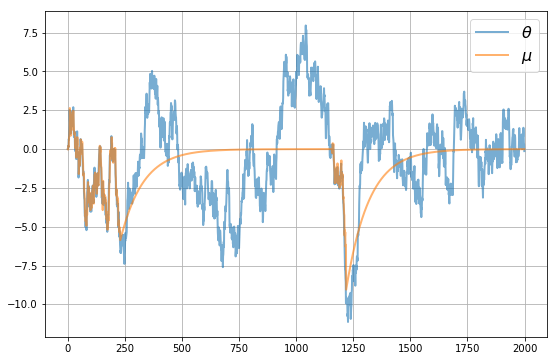
We see that
However, there are times when
These are episodes where the uncertainty traps take hold.
During these episodes
precision is low and uncertainty is high
few firms are in the market
To get a clearer idea of the dynamics, let’s look at all the main time series at once, for a given set of shocks
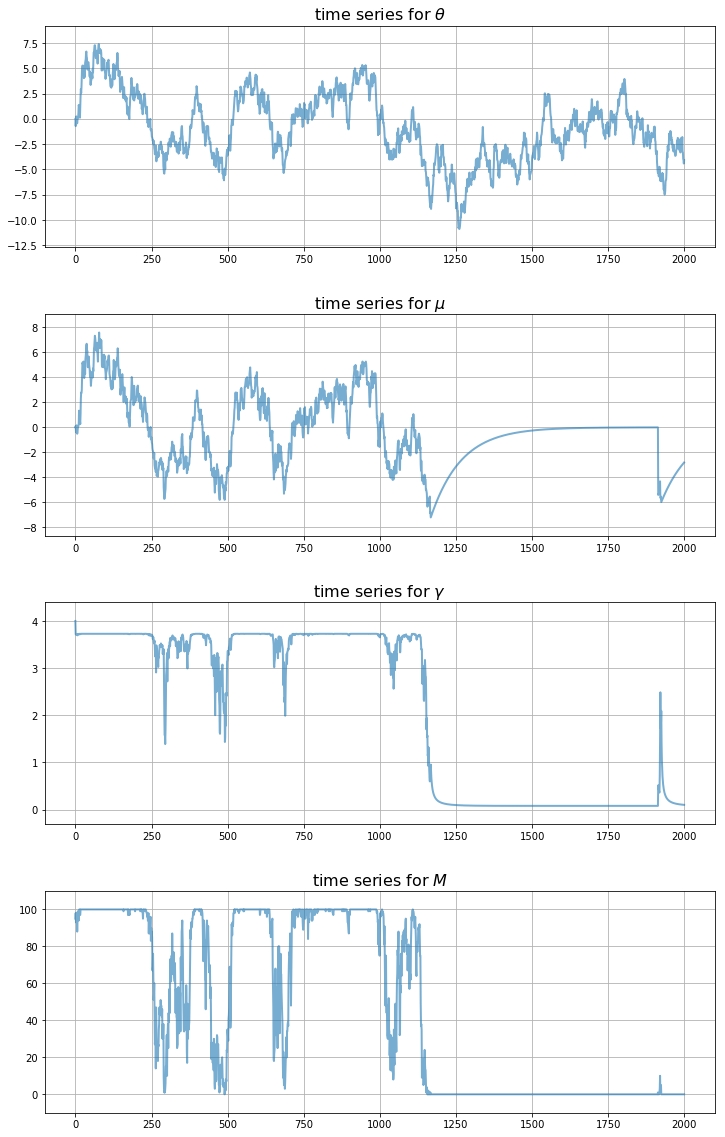
Notice how the traps only take hold after a sequence of bad draws for the fundamental.
Thus, the model gives us a propagation mechanism that maps bad random draws into long downturns in economic activity.
53.5. Exercises#
53.5.1. Exercise 1#
Fill in the details behind (53.2) and (53.3) based on the following standard result (see, e.g., p. 24 of [YS05]).
Fact Let
where
53.5.2. Exercise 2#
Modulo randomness, replicate the simulation figures shown above
Use the parameter values listed as defaults in the function UncertaintyTrapEcon.
53.6. Solutions#
53.6.1. Exercise 1#
This exercise asked you to validate the laws of motion for
The stated result tells us that after observing average output
where
If we take a random variable
53.7. Exercise 2#
First let’s replicate the plot that illustrates the law of motion for precision, which is
Here
econ = UncertaintyTrapEcon()
(; rho, sigma_theta, gamma_x) = econ # simplify names
# grid for gamma and gamma_{t+1}
gamma = range(1e-10, 3, length = 200)
M_range = 0:6
gammap = 1 ./ (rho^2 ./ (gamma .+ gamma_x .* M_range') .+ sigma_theta^2)
labels = ["0" "1" "2" "3" "4" "5" "6"]
plot(gamma, gamma, lw = 2, label = "45 Degree")
plot!(gamma, gammap, lw = 2, label = labels)
plot!(xlabel = L"\gamma", ylabel = L"\gamma^\prime", legend_title = L"M",
legend = :bottomright)

The points where the curves hit the 45 degree lines are the long run
steady states corresponding to each
Next let’s generate time series for beliefs and the aggregates – that is, the number of active firms and average output
function simulate(uc, capT = 2_000)
# unpack parameters
(; a, gamma_x, rho, sigma_theta, num_firms, sigma_F, c, mu_init, gamma_init, theta_init, sigma_x) = uc
# draw standard normal shocks
w_shocks = randn(capT)
# aggregate functions
# auxiliary function psi
function psi(gamma, mu, F)
temp1 = -a * (mu - F)
temp2 = 0.5 * a^2 / (gamma + gamma_x)
return (1 - exp(temp1 + temp2)) / a - c
end
# compute X, M
function gen_aggregates(gamma, mu, theta)
F_vals = sigma_F * randn(num_firms)
M = sum(psi.(Ref(gamma), Ref(mu), F_vals) .> 0) # counts number of active firms
if any(psi(gamma, mu, f) > 0 for f in F_vals) # there is an active firm
x_vals = theta .+ sigma_x * randn(M)
X = mean(x_vals)
else
X = 0.0
end
return (; X, M)
end
# initialize dataframe
X_init, M_init = gen_aggregates(gamma_init, mu_init, theta_init)
df = DataFrame(gamma = gamma_init, mu = mu_init, theta = theta_init,
X = X_init, M = M_init)
# update dataframe
for t in 2:capT
# unpack old variables
theta_old, gamma_old, mu_old, X_old, M_old = (df.theta[end],
df.gamma[end], df.mu[end],
df.X[end], df.M[end])
# define new beliefs
theta = rho * theta_old + sigma_theta * w_shocks[t - 1]
mu = (rho * (gamma_old * mu_old + M_old * gamma_x * X_old)) /
(gamma_old + M_old * gamma_x)
gamma = 1 / (rho^2 / (gamma_old + M_old * gamma_x) + sigma_theta^2)
# compute new aggregates
X, M = gen_aggregates(gamma, mu, theta)
push!(df, (; gamma, mu, theta, X, M))
end
# return
return df
end
simulate (generic function with 2 methods)
First let’s see how well
df = simulate(econ)
plot(eachindex(df.mu), df.mu, lw = 2, label = L"\mu")
plot!(eachindex(df.theta), df.theta, lw = 2, label = L"\theta")
plot!(xlabel = L"x", ylabel = L"y", legend_title = "Variable",
legend = :bottomright)

Now let’s plot the whole thing together
len = eachindex(df.theta)
yvals = [df.theta, df.mu, df.gamma, df.M]
vars = [L"\theta", L"\mu", L"\gamma", L"M"]
plt = plot(layout = (4, 1), size = (600, 600))
for i in 1:4
plot!(plt[i], len, yvals[i], xlabel = L"t", ylabel = vars[i], label = "")
end
plot(plt)
